
Thank you for visiting my theme! Replace this with your message to visitors.
Multiview 3D reconstruction is one of fundmental tasks in computer vision. One can reconstruct geometric structure of real wold scene by estimating the depth and poses of cameras, which provides infrastructural data for object detection, segmentation and background modeling.
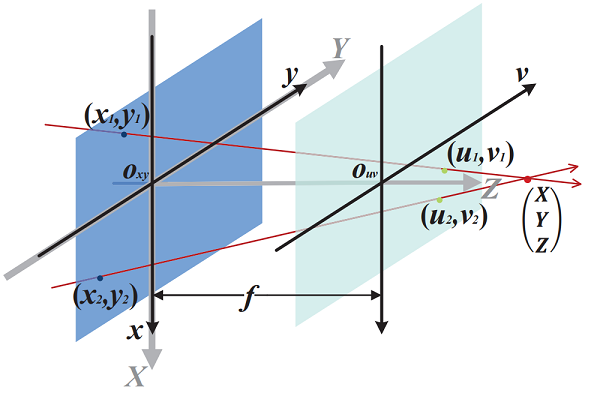
Rectifying Projective Distortion in 4D Light Field
Chunping Zhang, Zhe Ji, Qing Wang
ICIP 2016, Phoenix City, USA, pp.1464-1468, 2016 (09.25-09.28)
Paper |
Code |
BibTeX |
Github
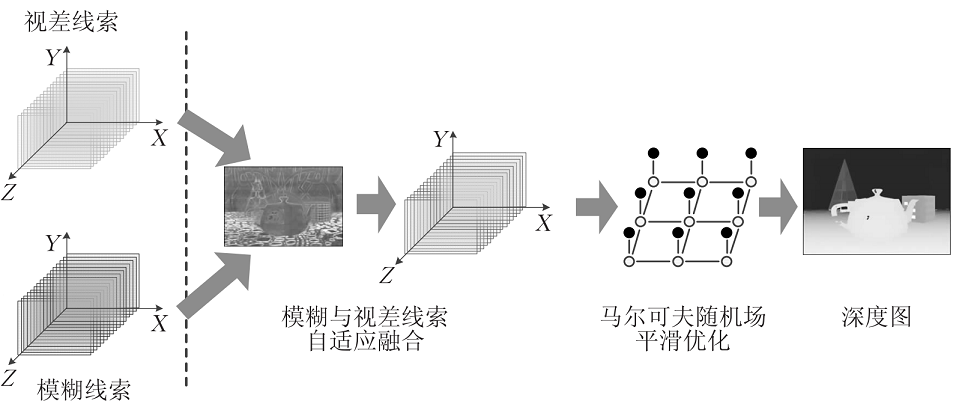
Depth Estimation from Light Field Analysis Based Multiple Cues Fusion
Degang Yang, Zhaolin Xiao, Heng Yang, Qing Wang
计算机学报(Chinese Journal of Computers)
Paper |
Code |
BibTeX |
Github
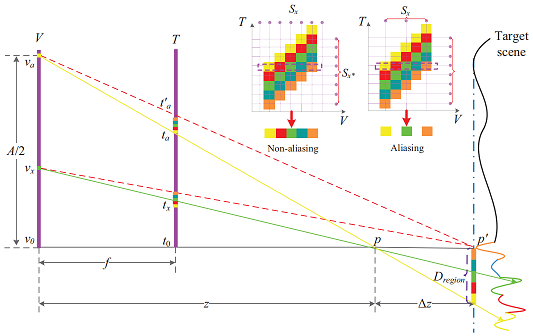
Aliasing Detection and Reduction in Plenoptic Imaging
Zhaolin Xiao, Qing Wang, Guoqing Zhou, Jingyi Yu
CVPR 2014, Columbus, USA, pp. 3326-3333, 2014.06.23-28
Paper |
Code |
BibTeX |
Github

A Resection Method Based on Enhanced Continuous Taboo Search
Guoqing Zhou, Qing Wang
电子学报 (ACTA ELECTRONICA SINICA)
Paper |
Code |
BibTeX |
Github
"The man can be destroyed but not defeated。" - Ernest Miller Hemingway