
Thank you for visiting my theme! Replace this with your message to visitors.
Object Detection and Action Recognition
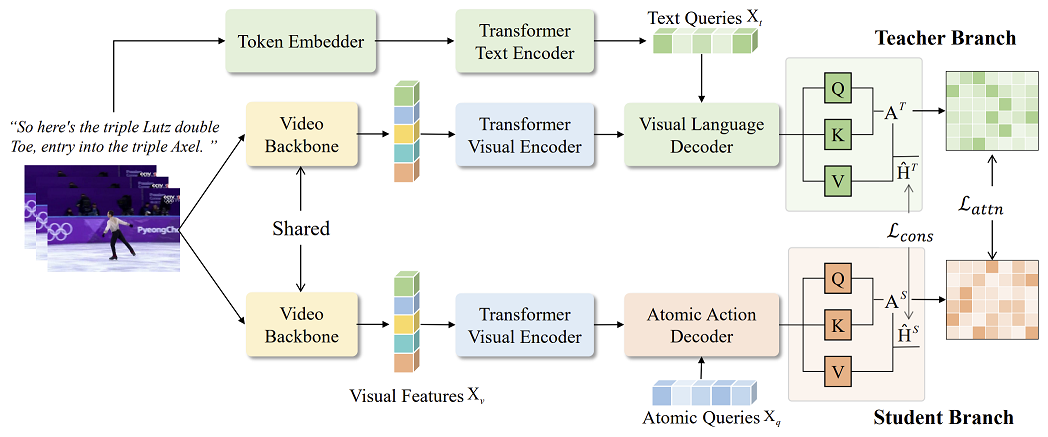
Learning Semantics-Guided Representations for Scoring Figure Skating
Zexing Du, Di He, Xue Wang, Qing Wang
IEEE TMM, 26: 4987-4997, 2024 (2023.10.30 online)
Paper |
Code |
BibTeX |
Github
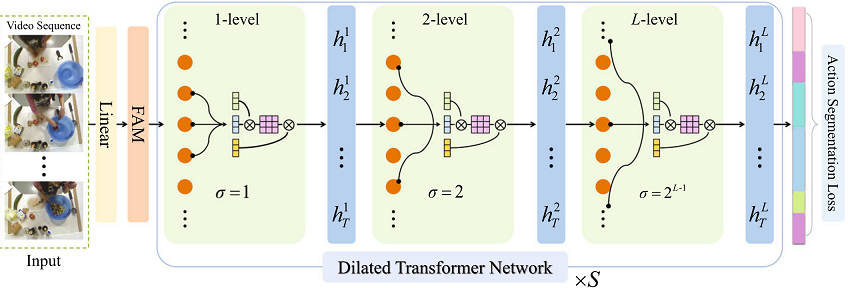
Dilated Transformer with Feature Aggregation Module for Action Segmentation
Zexing Du, Qing Wang
NPL (Neural Processing Letters), 55: 6181-6197, 2023 (2022.12.21 online)
Paper |
Code |
BibTeX |
Github
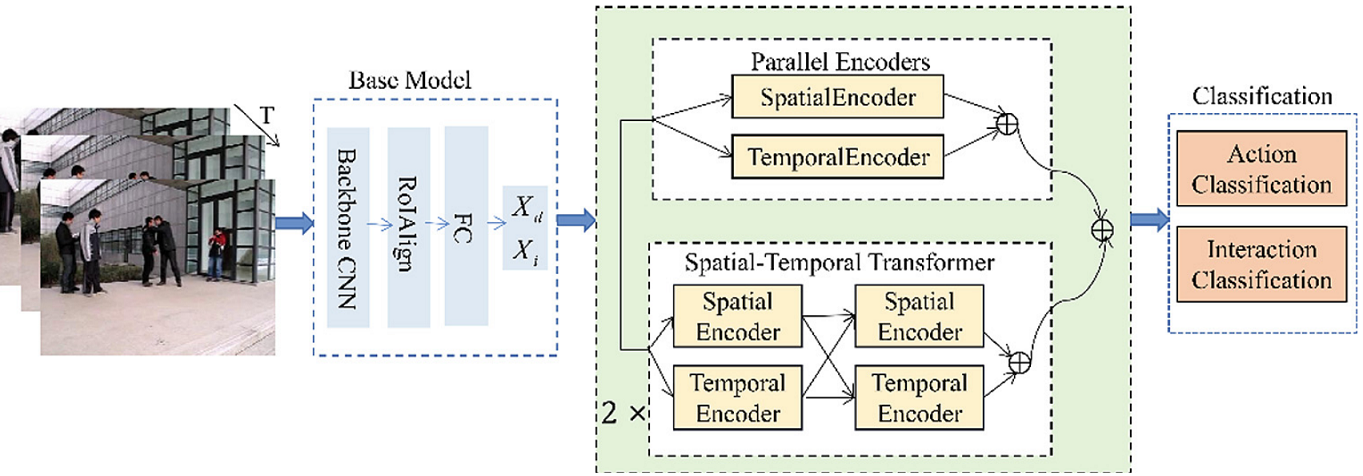
InterFormer: Human Interaction Understanding with Deformed Transformer
Di He, Zexing Du, Xue Wang, Qing Wang
ICIC 2023, Zhengzhou, China, (5) pp.193-203, 2023.08
Paper |
Code |
BibTeX |
Github
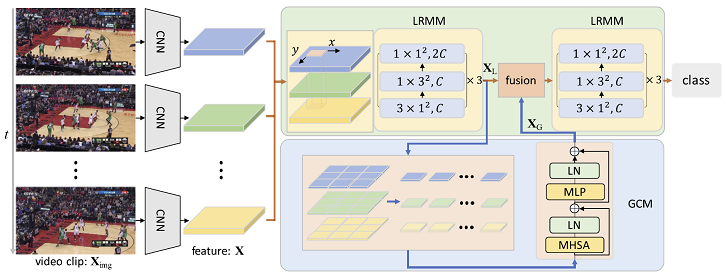
Perceiving Local Relative Motion and Global Correlations for Weakly Supervised Group Activity Recognition
Zexing Du, Xue Wang, Qing Wang
IVC (Image and Vision Computing), 137: 104789, 2023.09
Paper |
Code |
BibTeX |
Github
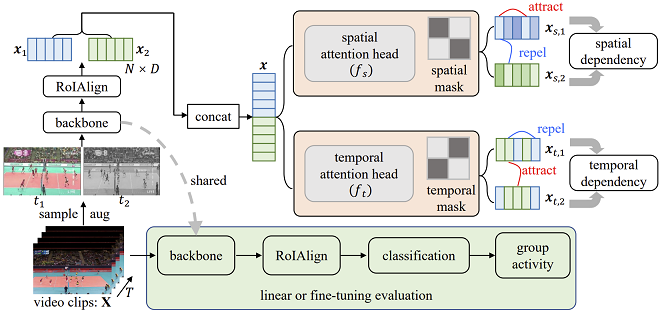
Self-Supervised Global Spatio-Temporal Interaction Pre-Training for Group Activity Recognition
Zexing Du, Xue Wang, Qing Wang
IEEE TCSVT, 33(9): 5076-5088, 2023, (2023.02.27 online)
Paper |
Code |
BibTeX |
Github
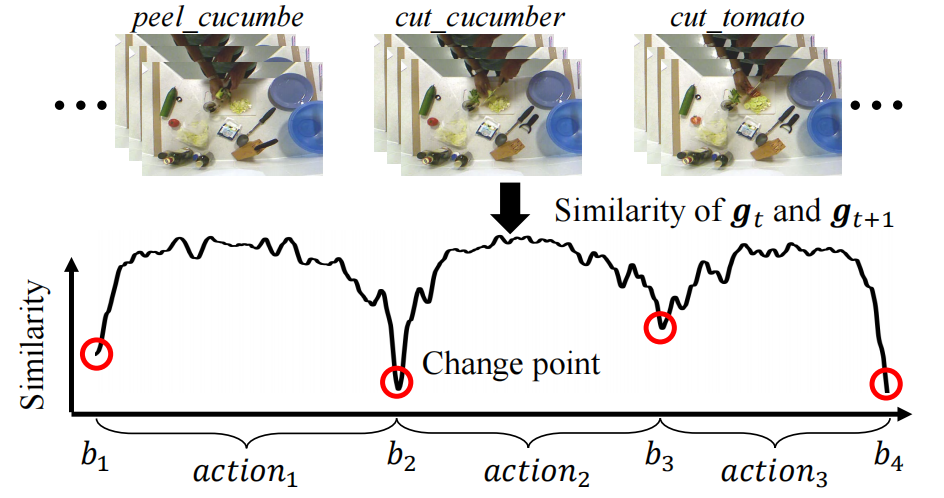
Fast and Unsupervised Action Boundary Detection for Action Segmentation
Zexing Du, Xue Wang, Guoqing Zhou, Qing Wang
CVPR 2022, New Orleans, LA, USA, pp. 3313-3322, 2022.06
Paper |
Code |
BibTeX |
Github
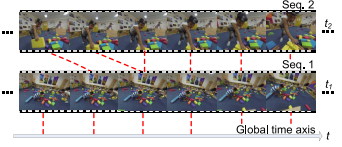
Motion-Based Temporal Alignment of Independently Moving Cameras
Xue Wang, Jianbo Shi, Hyun Soo Park, Qing Wang
IEEE TCSVT, 27(11):2344-2354, 2017 (2016.06.15 online)
Paper |
Code |
BibTeX |
Github
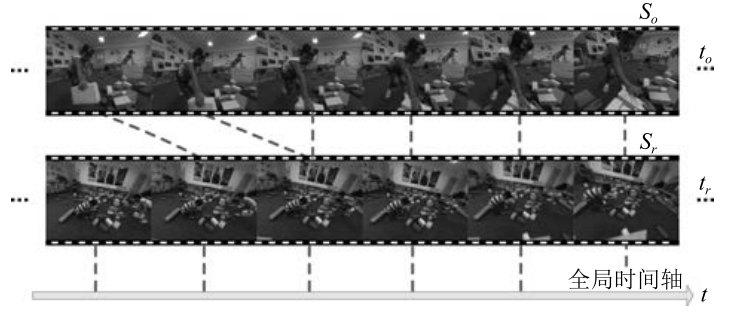
Synchronization of Video Sequences Through 3D Trajectory Reconstruction
Wang Xue, SHI Jian-Bo, PARK Hyun-Soo, Wang Qing
自动化学报(ACTA AUTOMATICA SINICA),43(10):1759-1772, 2017
Paper |
Code |
BibTeX |
Github

Figure-Aware Tracking under Occlusion from Monocular Videos
Xue Wang, Qing Wang
ICVRV
Paper |
Code |
BibTeX |
Github

An Image Classification Approach Based on Sparse Coding and Multiple Kernel Learning
Xiaozhen Qi, Qing Wang
电子学报 (ACTA ELECTRONICA SINICA)
Paper |
Code |
BibTeX |
Github

Spatio-Temporal Clustering Model for Multi- Object Tracking through Occlusions
Lei Zhang, Qing Wang
ACCV 2012, Daejeon, Korea, pp.29-42, 2012.11
Paper |
Code |
BibTeX |
Github

Robust Visual Tracking using Dynamic Classifier Selection with Sparse Representation of Label Noise
Yuefeng Chen, Qing Wang
ACCV 2012, Daejeon, Korea, pp.29-42, 2012.11
Paper |
Code |
BibTeX |
Github
Motion Estimation Approach Based on Dual-tree Complex Wavelets
Changzhu Wu, Qing Wang, Hongxiao Wang
ICPR
Paper |
Code |
BibTeX |
Github
"The man can be destroyed but not defeated。" - Ernest Miller Hemingway